What is connected to the Parallel Port.
-Pin 02 & 03 are connected with the A & B channel of the MPG.
Go to the LinuxCNC MPG section for details.
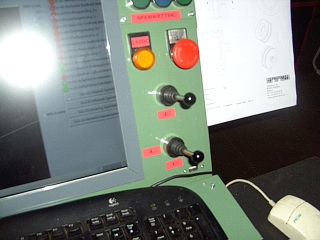
-Pin 04 & 05 are external buttons (on/off joysticks) and represent X+ and X- at a speed of 5.000mm/min.
-Pin 06 & 07 are external buttons (on/off joysticks) and represent Y+ and Y- at a speed of 5.000mm/min.
-Pin 08 & 09 are external buttons (on/off joysticks) and represent Z+ and Z- at a speed of 5.000mm/min.
This rapid speed can be decreased by the FEED OVERRIDE, but remain uninfluenced by the Jog Speed button of the GUI of AXIS.
For the HAL file, it was pncconf that brought the enlightment.
We added to the HAL file:
# ---jog button signals---
sets jog-speed 5000.000000
#JOGGING WITH EXTERNAL PARPORT BUTTONS
#added to the pyvcp-alarms on 28-05-2013 to get our Joysticks working.
# --- JOG-X-POS ---
net jog-x-pos <= parport.0.pin-04-in
# --- JOG-X-NEG ---
net jog-x-neg <= parport.0.pin-05-in
# --- JOG-Y-POS ---
net jog-y-pos <= parport.0.pin-06-in
# --- JOG-Y-NEG ---
net jog-y-neg <= parport.0.pin-07-in
# --- JOG-Z-POS ---
net jog-z-pos <= parport.0.pin-08-in
# --- JOG-Z-NEG ---
net jog-z-neg <= parport.0.pin-09-in